06. Rigid Bodies in Free Space
Rigid Bodies in Free Space
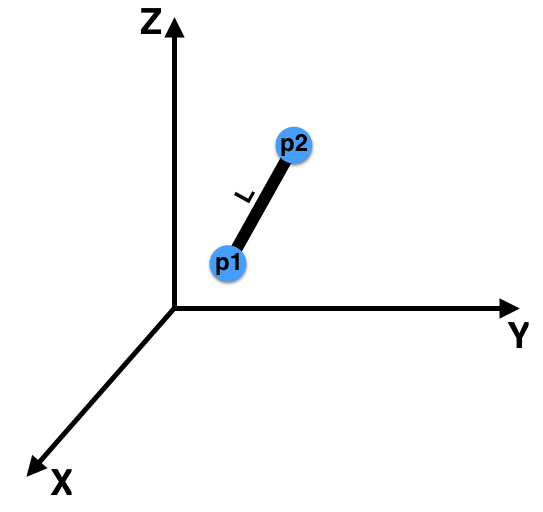
In the previous examples, you saw that two particles connected by rod and confined to a planar surface did not have four degrees of freedom, only three. This is, in fact, true of any rigid body moving on a plane. If you locate one point on the body and define its orientation with respect to some fixed axis, you have completely specified its configuration. Or, in other words, you could immediately determine the location of any other point on the rigid body with the knowledge of these three variables. What about a rigid body in “free space”, i.e., an unrestricted three-dimensional world?
Rigid Body in Free Space
SOLUTION:
6Individual rigid bodies are not particularly interesting in and of themselves, but in the world of serial manipulators, you can break most problems down in terms of rigid bodies connected by joints. Just as the addition of links between points in space reduces the number of degrees of freedom of a system (as seen in previous exercises), the addition of joints to a system of otherwise disconnected bodies also reduces the number of degrees of freedom. So for starters, how many degrees of freedom do two independent rigid bodies in free space have?
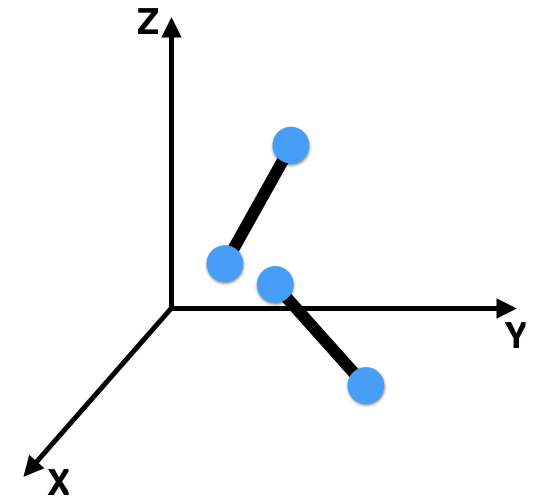
Two rigid bodies in free space
Two Rigid Bodies in Free Space
SOLUTION:
12Adding a Joint
What if we now connect the two free floating rigid bodies with a revolute joint, such that the whole system is still free floating, but the two bodies are attached to one another?
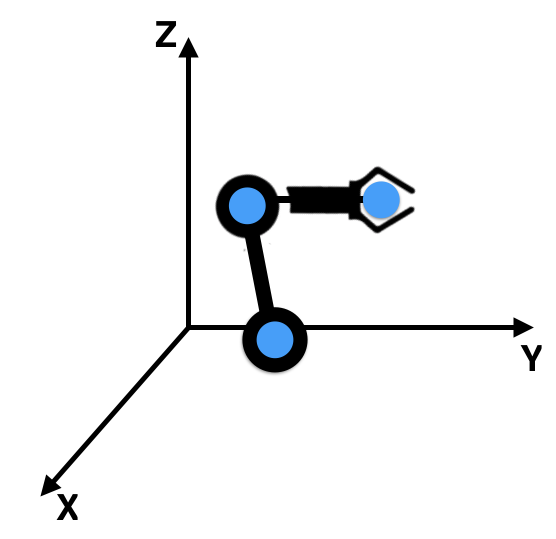
Here we have our serial manipulator back, but now it is not constrained to a plane and the base is not fixed. How many degrees of freedom does this system have now?
Joint Constraint
SOLUTION:
7Things to keep in mind
A rigid body has 6 degrees of freedom in space:
- Position(x, y, z)
- Orientation(\alpha, \beta, \gamma)
A point has 3 degrees of freedom in space:
- Position(x, y, z)